
Neuigkeiten
Aktuelles aus dem Projekt.
Neuigkeiten

OSxCAR-Konsortialtreffen: Halbzeit und auf Kurs
Ende April 2026 trafen sich die Partner des öffentlich geförderten Projekts OSxCAR zu einem zweitägigen Konsortialtreffen in Wuppertal. Im Fokus standen der aktuelle Projektstand sowie die technische Abstimmung der nächsten Entwicklungsschritte.
Zur Projektmitte ist OSxCAR insgesamt gut vorangekommen: Die Gesamtarchitektur für softwaredefinierte Fahrzeugarchitekturen steht, erste WebAssembly‑basierte Demonstratoren sind umgesetzt und zentrale Komponenten der SDV‑Testbench — einschließlich der rekonfigurierbaren Switchmatrix — werden derzeit integriert und erprobt. Parallel laufen Arbeiten an einem hardwareunabhängigen Testframework sowie an KI‑gestützten Methoden zur Netzwerkoptimierung.
Das Treffen war stark arbeitsorientiert: Neben kompakten Statusupdates aller Partner wurden vor allem technische Details zur Integration von Hard‑ und Software, zur Testautomatisierung und zur Vorbereitung weiterer Demonstrationen gemeinsam diskutiert.
Das Konsortium sieht sich auf gutem Kurs und arbeitet geschlossen an der Umsetzung des integrierten Gesamtsystems.
OSxCAR-Konsortialtreffen in Wuppertal 
Besprechung im Gange 
Vorstellung der neuesten Daten 
Tagungsraum 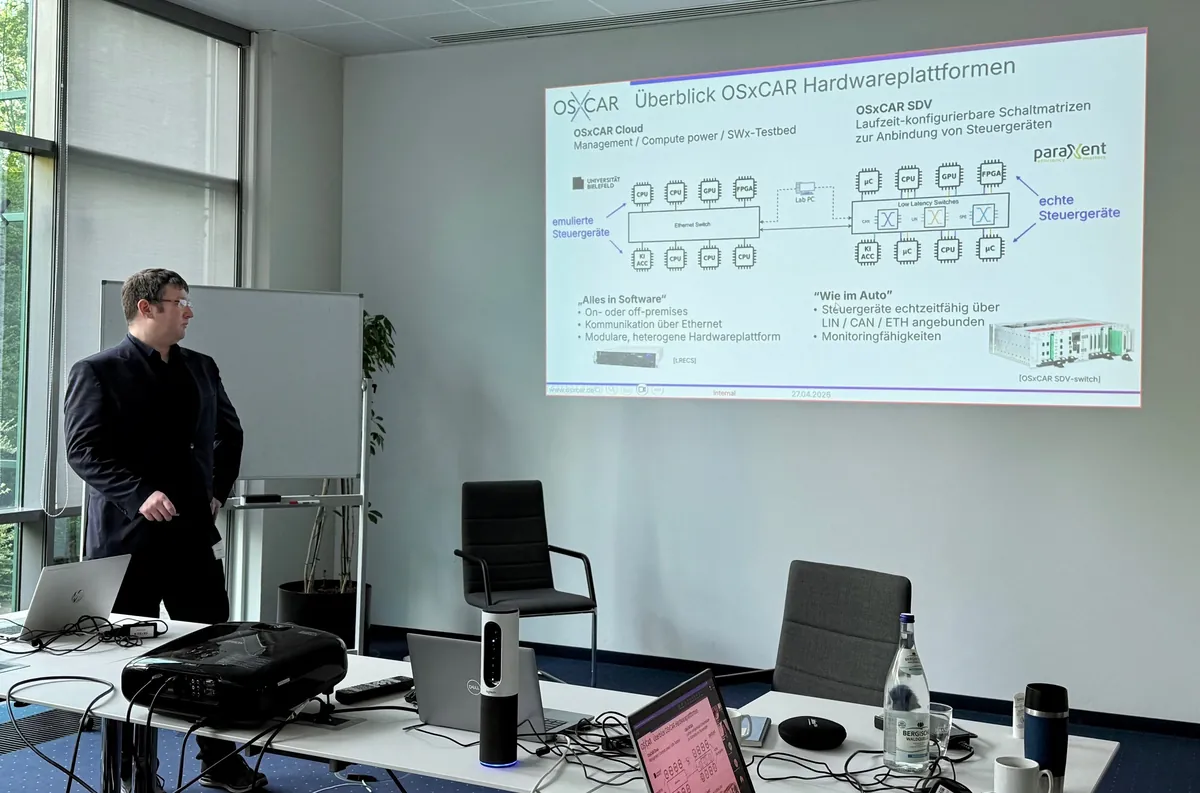
Technische Diskussion 
Gemeinsames Gruppenfoto Sachbericht 2025 finalisiert
t.RECS ins OSxCAR Testbed integriert
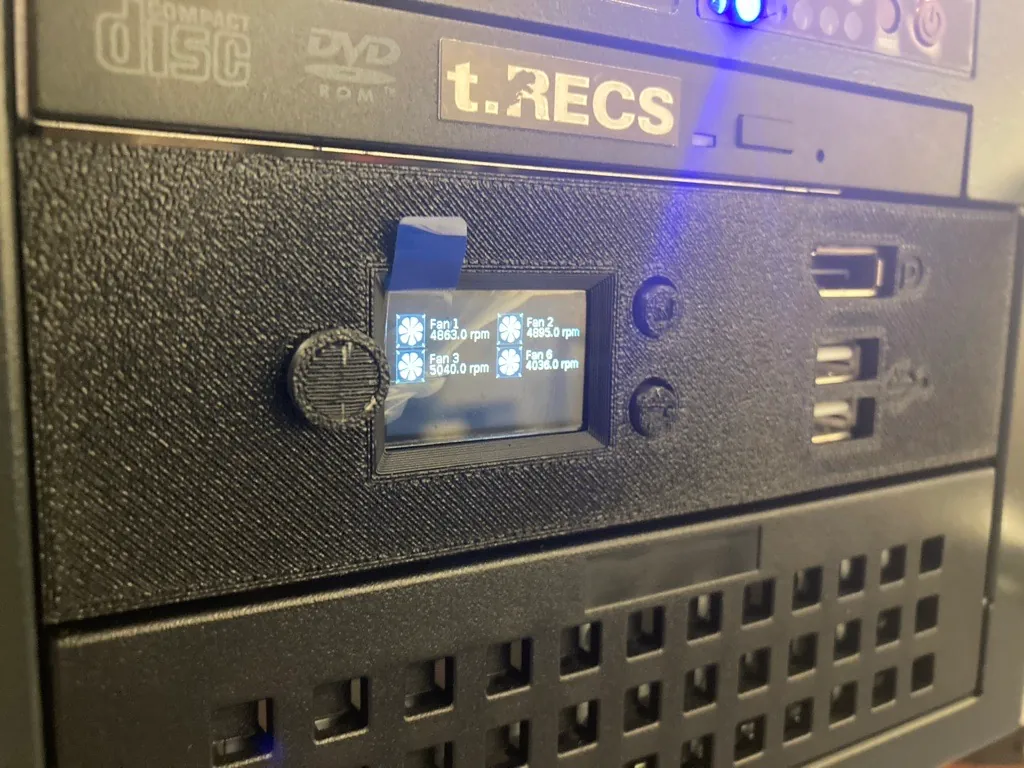
Die Integration des t.RECS Microserver-Systems erweitert das OSxCAR Testbed um leistungsfähige, heterogene Rechenressourcen. In Kombination mit WebAssembly ermöglicht OSxCAR die plattformunabhängige Ausführung von Anwendungen sowie die effiziente Evaluierung von Performance und Energieeffizienz über unterschiedliche Hardwarearchitekturen hinweg.
t.RECS Microserver-System im OSxCAR Testbed 
Innenansicht des t.RECS Microservers 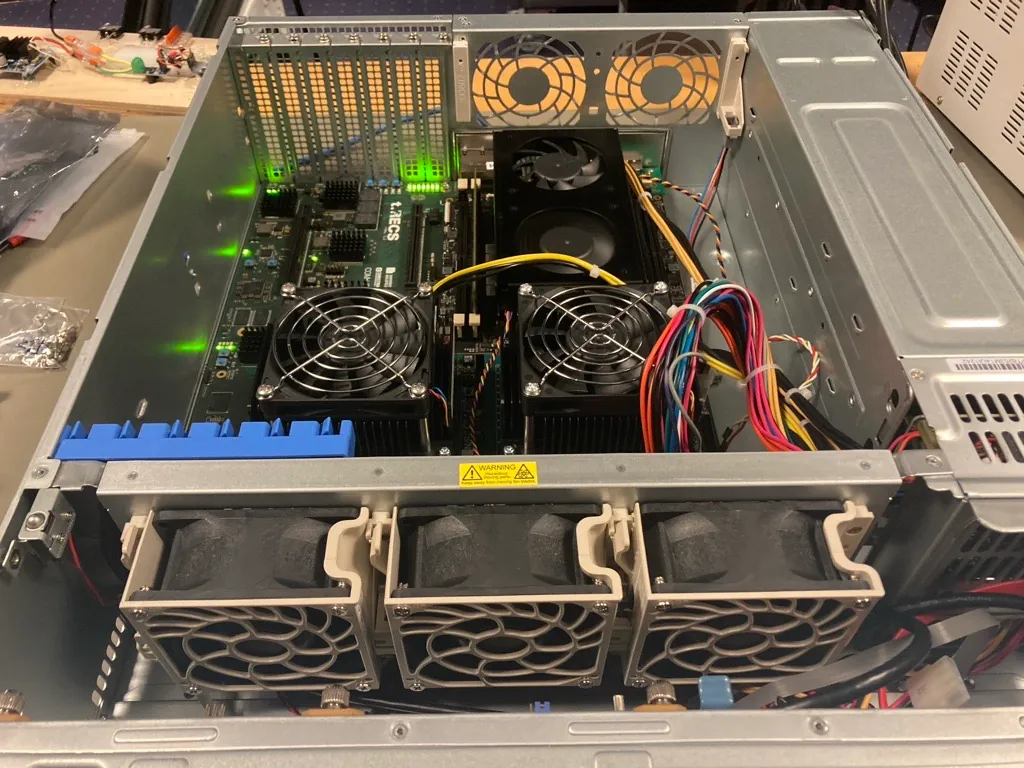
Draufsicht auf die heterogenen Rechenmodule 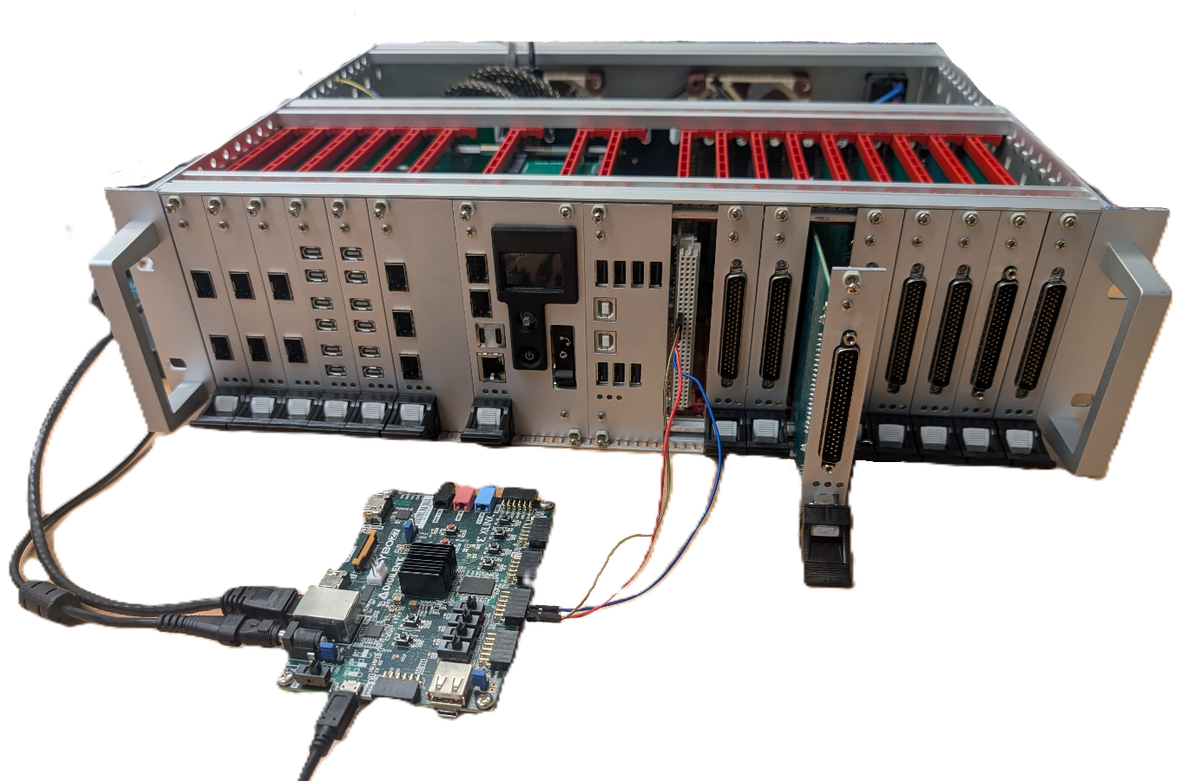
CAN-Switch-Matrix entwickelt und erfolgreich getestet
Die OSxCAR CAN-Switch-Matrix wurde erfolgreich entwickelt, gefertigt und unter realistischen Betriebsbedingungen getestet. Sie unterstützt bis zu 8 CAN-FD-Busse mit bis zu 5 Mbit/s und ermöglicht eine flexible, softwaregesteuerte Verschaltung.
Das System ist in einem industriellen DIN-/Schroff-Chassis mit 4-TE-Einschüben realisiert und bietet zusätzliche digitale und analoge I/Os für vielseitige Integrationsszenarien.
Mehrere Teilnehmer konnten flexibel auf interne Busse geschaltet werden und kommunizierten stabil und fehlerfrei. Die Ergebnisse bestätigen die Eignung für dynamisch rekonfigurierbare Kommunikationsszenarien innerhalb der OSxCAR Plattform.
CAN-Switch-Matrix entwickelt und erfolgreich getestet 
OSxCAR Konsortialtreffen: Zusammenarbeit in Aktion
Zum letzten Mal im Jahr 2025 traf sich das OSxCAR-Projektteam mit den Partnern der Bergischen Universität Wuppertal, CETEQ GmbH, Universität Bielefeld und paraXent GmbH im CTC von Aptiv Services Deutschland GmbH in Wuppertal.
Während der zweitägigen Sitzung wurden technische Strategien abgestimmt und die wichtigsten Fortschritte in allen Arbeitspaketen überprüft.
Zu den zentralen Highlights gehörten:
- Universität Bielefeld präsentierte Fortschritte bei OSxCAR-spezifischen Karten für heterogenes Computing
- CETEQ stellte erweiterte Testframeworks vor, die speziell für WebAssembly-Module entwickelt wurden
- paraXent demonstrierte die Integration der Low-Latency-Switching-Plattform innerhalb von t.RECS
- Bergische Universität Wuppertal gab Einblicke in die Netzwerklastvorhersage mit Unterstützung durch maschinelles Lernen für verteilte Automobilsysteme
- Aptiv zeigte Echtzeit-Hardwareimplementierungen von WebAssembly-Komponenten auf Embedded-Systemen, Fortschritte beim parallelen Software-Framework Shadow Mode sowie Aktivitäten zur Kundeninteraktion und Medienarbeit
Ein besonderes Highlight war der praxisorientierte Workshop, in dem Integrationsherausforderungen zwischen Komponenten-Laufzeitumgebungen und Plattformdiensten auf Echtzeit-Embedded-Systemen gemeinsam gelöst wurden. Die technischen Diskussionen eröffneten neue Möglichkeiten zur Optimierung von WebAssembly für fahrzeugspezifische Anforderungen.
Das Besondere an OSxCAR ist die Kombination aus akademischer Exzellenz und industrieller Expertise. Diese Zusammenarbeit ist entscheidend für die Entwicklung der nächsten Generation softwaredefinierter Fahrzeugarchitekturen.
OSxCAR Konsortialtreffen: Zusammenarbeit in Aktion 
Gemeinsames Gruppenfoto 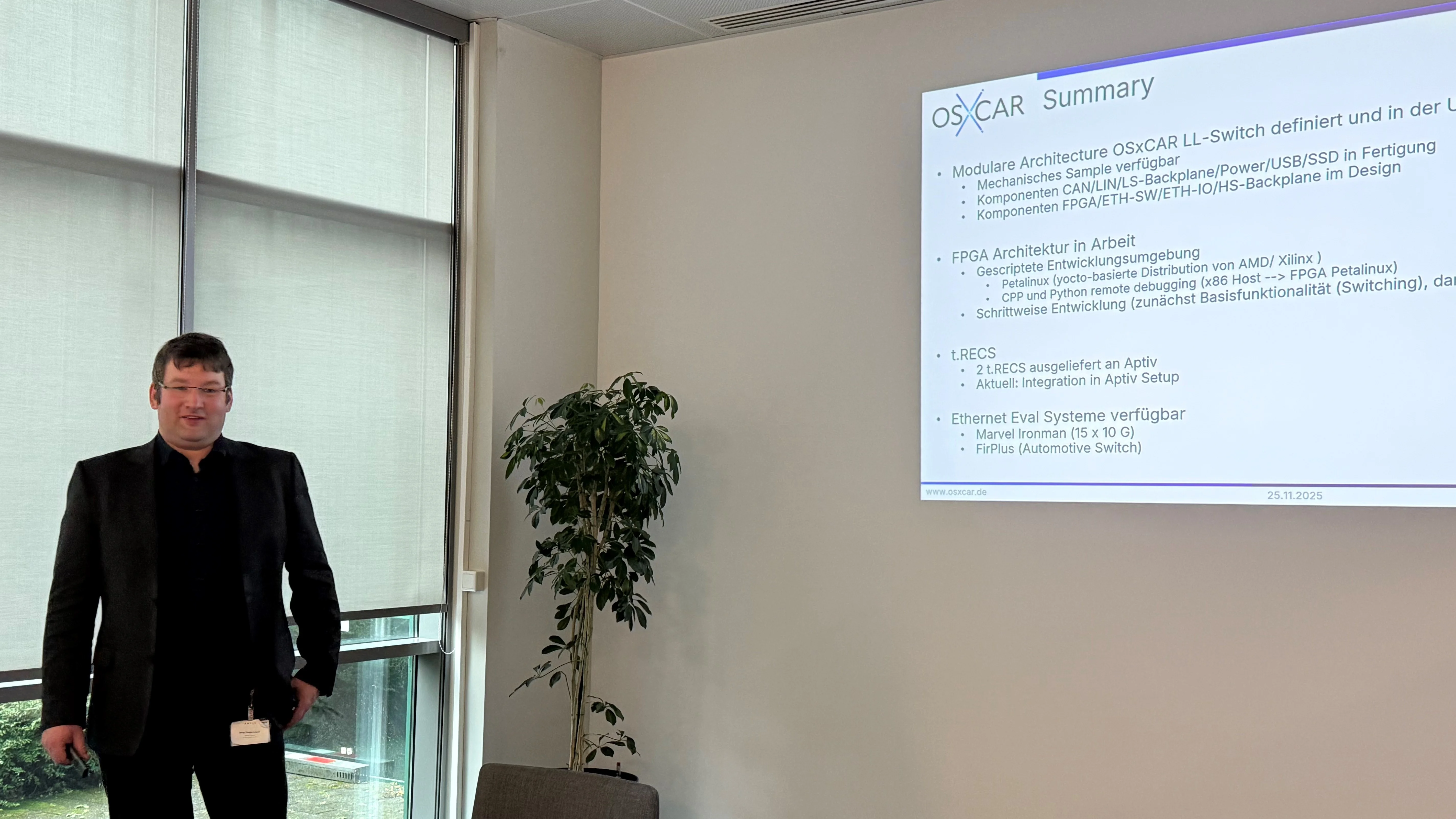
Zusammenfassung der Ergebnisse 
Aktueller Stand und Ausblick 
Erfolgreiche Installation des t.RECS 
Ausblick und Trends in der Industrie 
Mechanischer Prototyp der Switch-Matrix aufgebaut
Der mechanische Prototyp der modularen OSxCAR Low-Latency-Switch-Matrix wurde erfolgreich realisiert. Die Plattform unterstützt flexible Konfigurationen von 10 GbE bis hin zu Sub-Gigabit-Netzen sowie rekonfigurierbare CAN- und LIN-Busstrukturen mit bis zu 72 Teilnehmern.
Zentrale Hardwarekomponenten wurden integriert und bilden die Grundlage für eine skalierbare, softwaredefinierte Kommunikationsinfrastruktur im OSxCAR Testbed.
Mechanischer Prototyp der Switch-Matrix aufgebaut 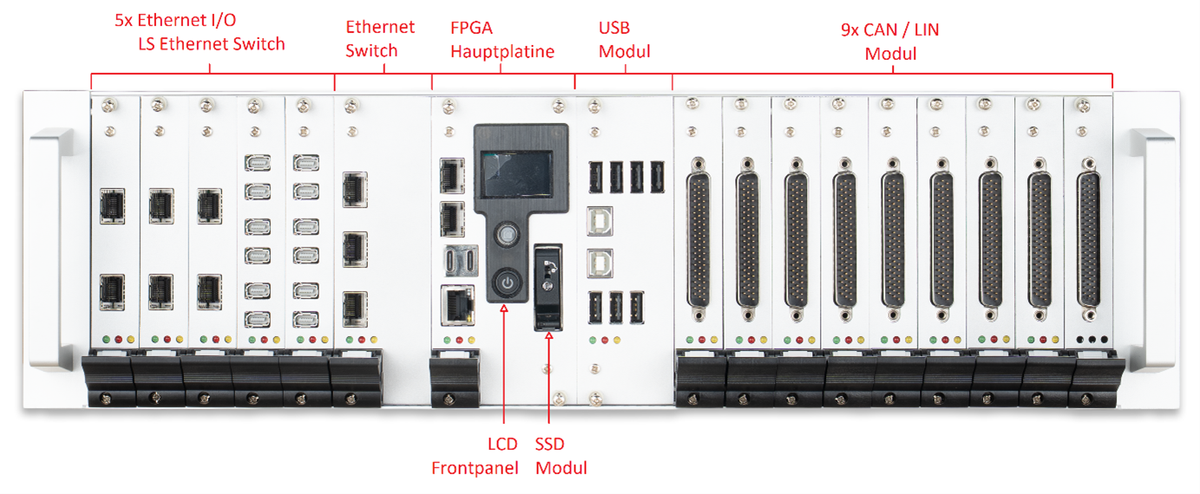
Frontansicht 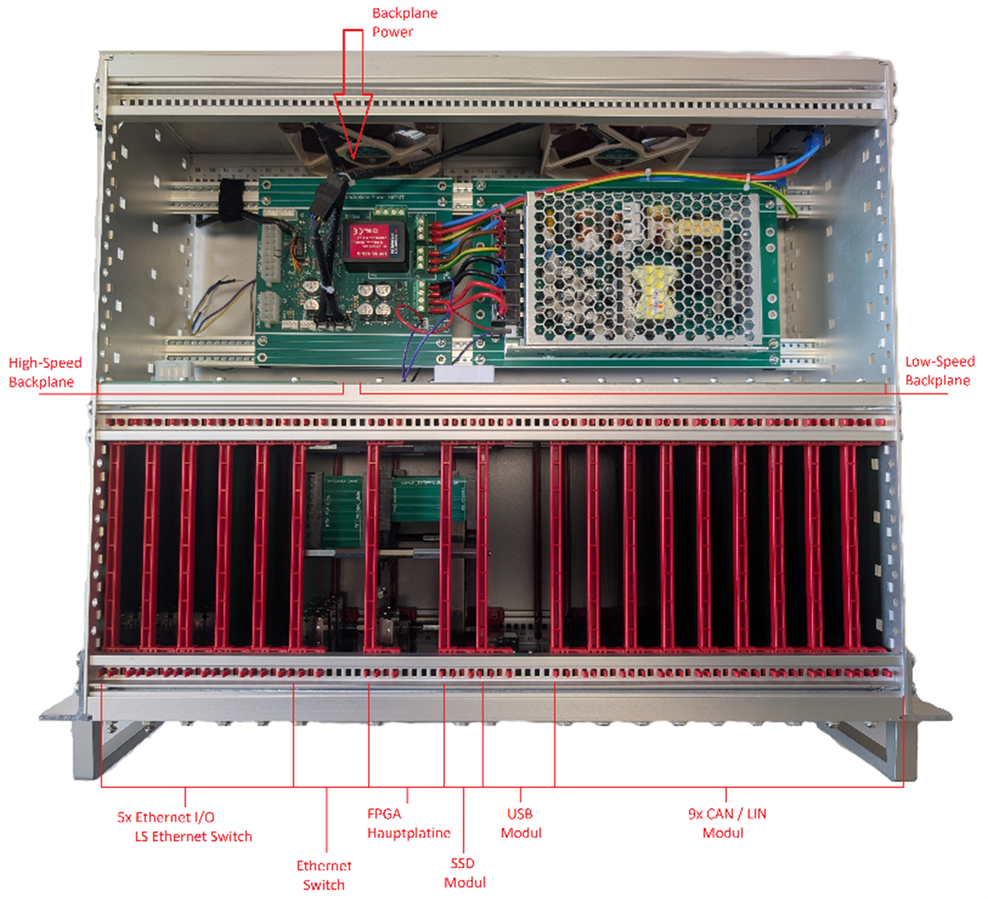
Draufsicht 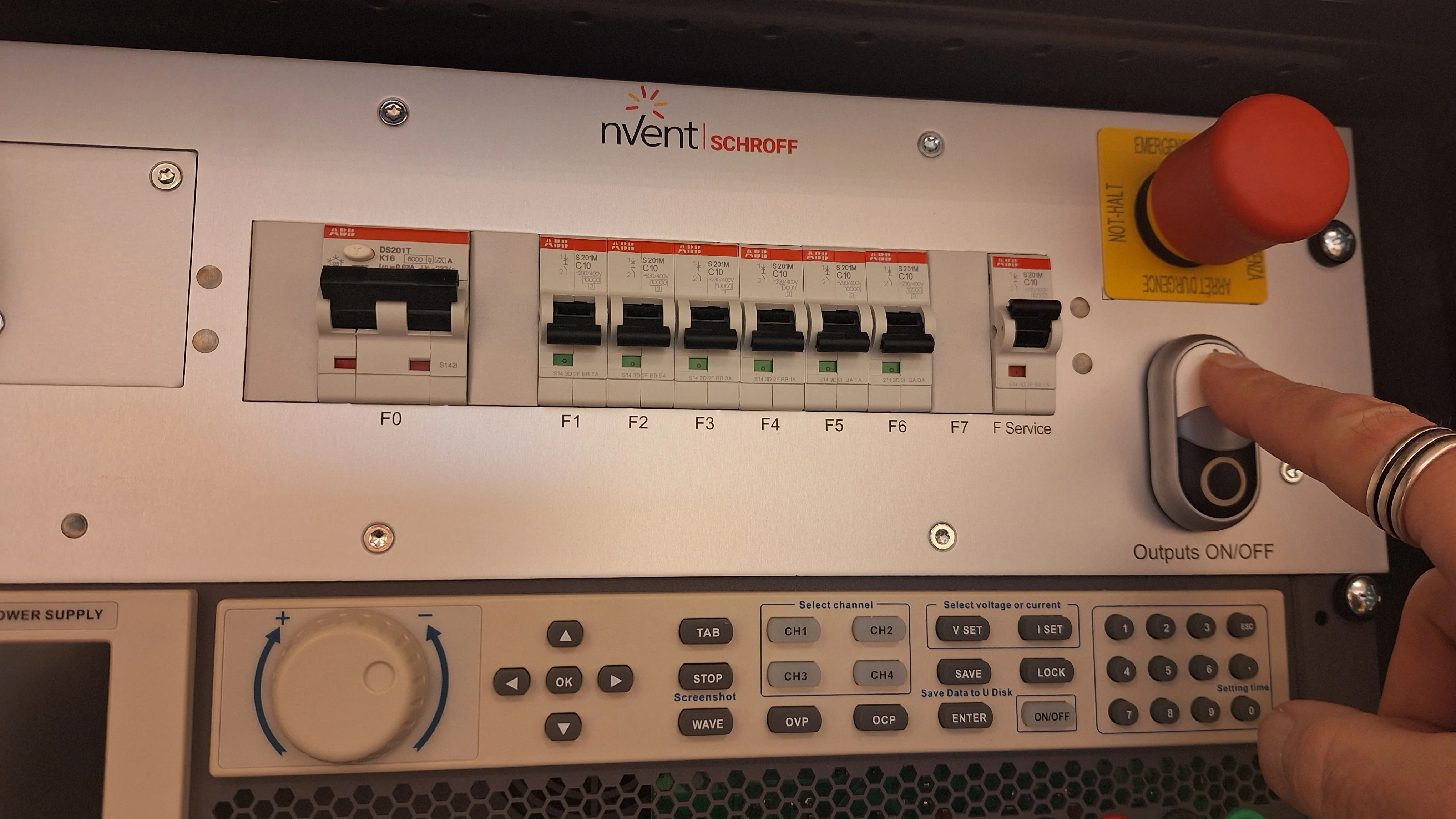
Systemaufbau der Testbench-Racks
Die ersten Testbench-Racks sind erfolgreich geliefert worden und befinden sich nun im schrittweisen Aufbau. Aktuell läuft der Systemaufbau, bei dem die mechanischen Komponenten, die programmierbaren Netzteile sowie die Backplane-Strukturen fachgerecht konfektioniert und miteinander verdrahtet werden. Dieser Meilenstein markiert den Beginn der technischen Umsetzung und schafft die Grundlage für die kommenden Integrations- und Validierungsphasen.
Systemaufbau der Testbench-Racks 
Kontrollpanel des Racks 
Rack-Einschübe bereit zur Installation weiterer Module 
OSxCAR Partnertreffen
Das OSxCAR-Konsortium traf sich zum Big Room Planning, um die konkreten Arbeitsschritte für das kommende Quartal festzulegen. In zwei parallelen Arbeitsgruppen wurden die Schwerpunkte KI-Netzwerkoptimierung und Testbench-Entwicklung vertieft.
Wichtige Entscheidungen:
- Fokussierung auf konkrete Anwendungsfälle mit Radar/Fusion360 als Benchmark
- Priorisierung der durchgängigen Cloud-zu-Edge Ausführbarkeit
- Einsatz von GNN-Technologie für die Netzwerkoptimierung
- Integration eines gemeinsamen Testframeworks mit grafischer Benutzeroberfläche
Die Hardware-Teams von paraXent und der Uni Bielefeld haben die Beschaffung von Evaluierungsboards für Ethernet-Switches eingeleitet.
OSxCAR Partnertreffen Abschluss Arbeitspaket 2

Quartals-Planung
Im Frühjahr 2025 trafen sich die Projektpartner zu einer fokussierten Quartals-Planungssitzung. Ziel war die Feinabstimmung der Aufgabenverteilung und Zeitplanung.
Ergebnisse:
- Optimierung der Arbeitspakete
- Abstimmung der Schnittstellen zwischen den Teams
- Festlegung kurzfristiger Ziele
Quartals-Planung Sachbericht 2024 finalisiert
Wegweisende HW-Auswahl finalisiert

OSxCAR Kickoff-Meeting
Am 3. Juli 2024 fand das offizielle Kickoff-Meeting des OSxCAR-Projekts statt. Alle fünf Projektpartner stellten ihre Teams vor und definierten die konkreten Arbeitsschritte für die kommenden Monate.
Wesentliche Ergebnisse:
- Detaillierte Aufgabenverteilung auf sieben Arbeitspakete
- Festlegung der ersten Meilensteine und Zeitplanung
- Konkretisierung der technischen Konzepte für WebAssembly-Integration und KI-Optimierung
Die Partner Aptiv (Konsortialführer), CETEQ, paraXent, Universität Bielefeld und Bergische Universität Wuppertal haben ihre jeweiligen Expertenteams und Verantwortlichkeiten definiert.
OSxCAR Kickoff-Meeting Projektstart OSxCAR
Weiter: Publikationen • Medien