
News
Latest news and developments about the OSxCAR project
Neuigkeiten

OSxCAR Consortium Meeting: Halfway There and on Track
At the end of April 2026, the partners of the publicly funded OSxCAR project met for a two-day consortium meeting in Wuppertal. The focus was on reviewing the current project status and aligning on the next technical steps.
At the project midpoint, OSxCAR has made solid progress overall: The system architecture for software-defined vehicle platforms is in place, first WebAssembly-based demonstrators have been implemented, and key components of the SDV testbench — including the reconfigurable switch matrix — are currently being integrated and validated. In parallel, work continues on a hardware-independent test framework and AI-assisted methods for network optimization.
The meeting was hands-on and work-focused. Alongside brief status updates from all partners, technical details were discussed in depth — particularly around hardware-software integration, test automation, and the preparation of upcoming demonstrations.
The consortium is confident in its direction and continues to work closely together on delivering the integrated overall system.
OSxCAR Consortium Meeting in Wuppertal 
Discussion in progress 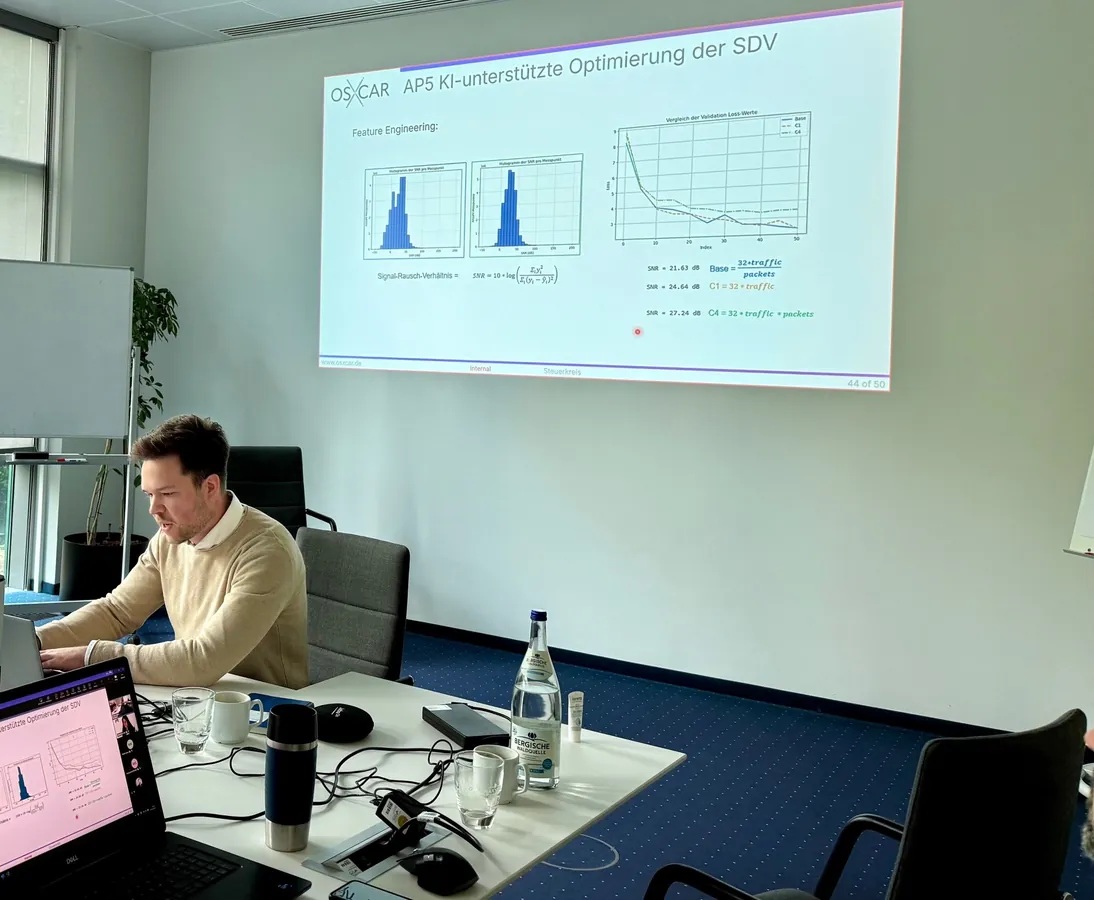
Presenting the latest data 
Meeting room 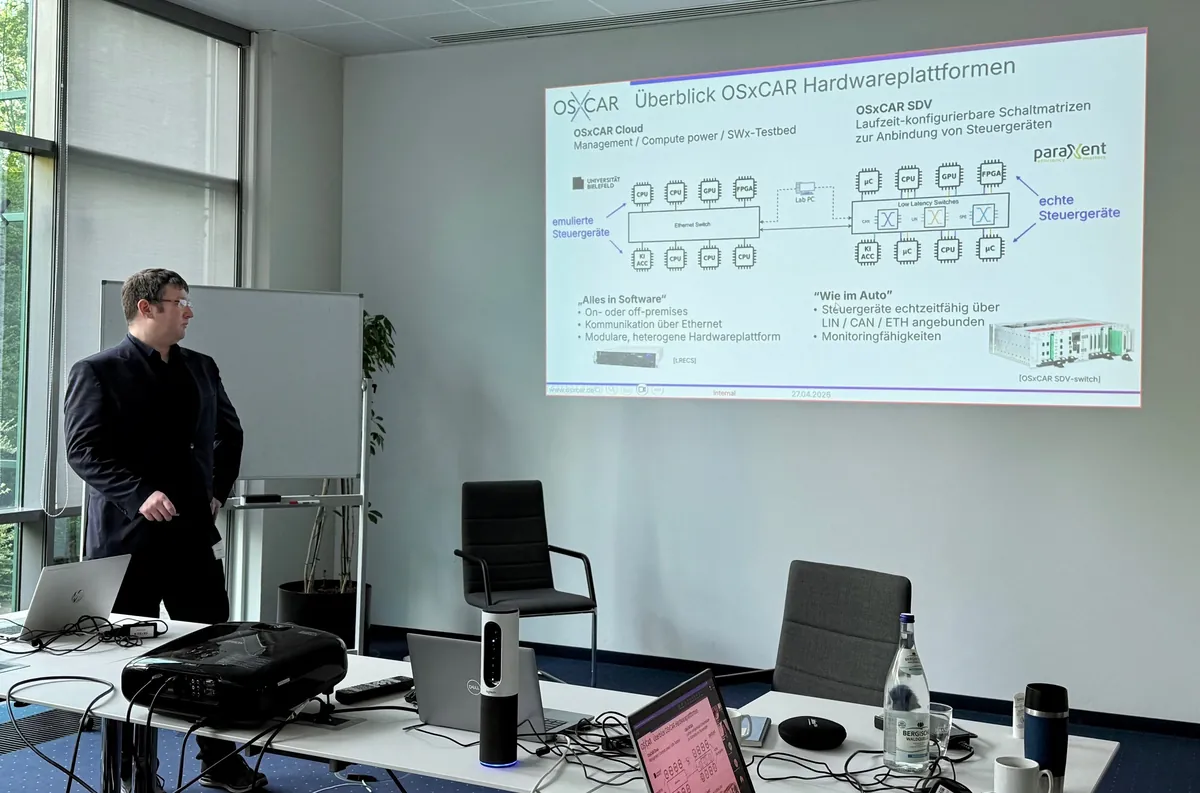
Technical discussion 
Group photo 2025 Progress Report Finalized
t.RECS Integrated into the OSxCAR Testbed
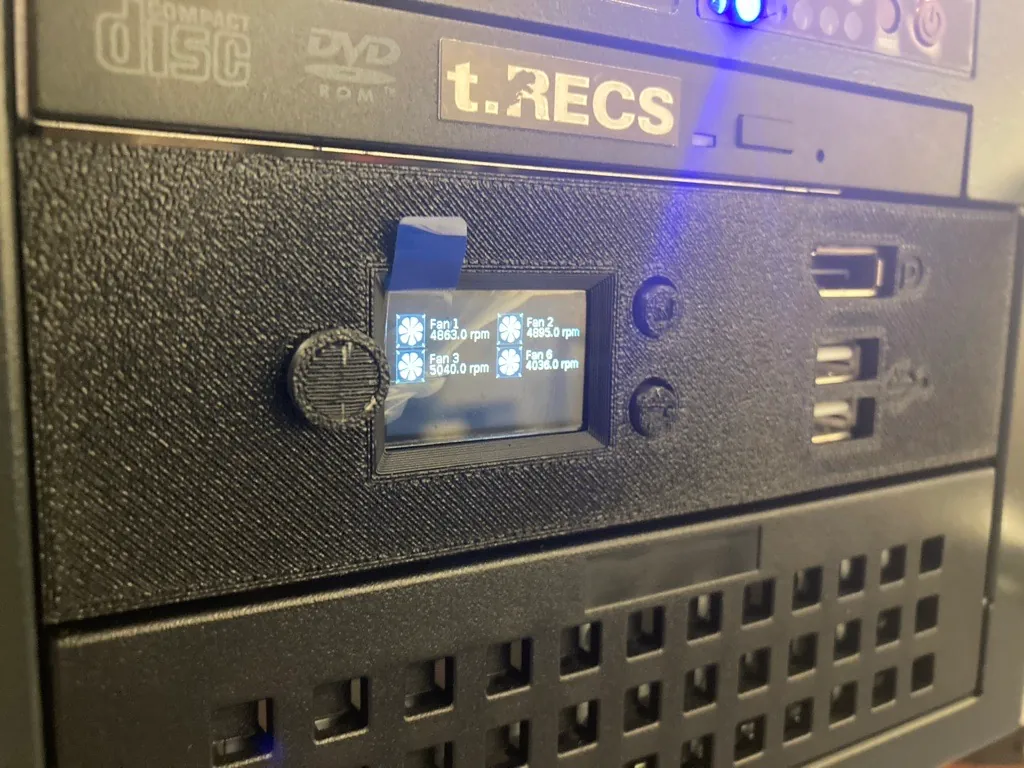
The integration of the t.RECS microserver system extends the OSxCAR testbed with powerful, heterogeneous compute resources. Combined with WebAssembly, OSxCAR enables platform-independent execution of applications and efficient evaluation of performance and energy efficiency across different hardware architectures.
t.RECS microserver system in the OSxCAR testbed 
Interior view of the t.RECS microserver 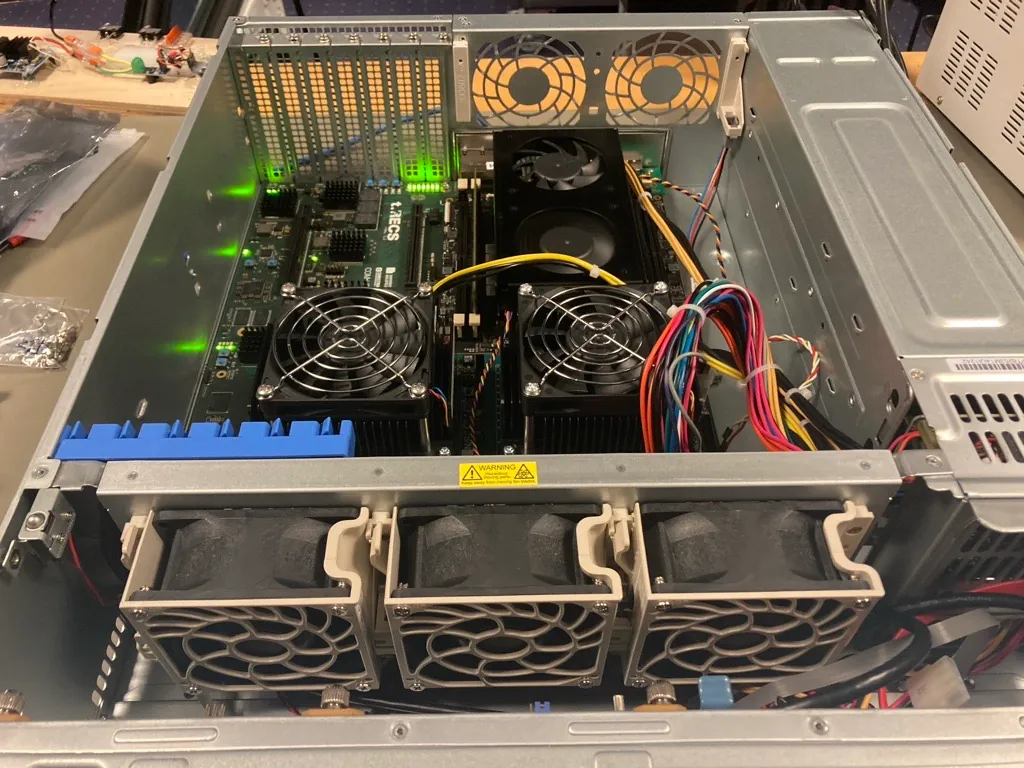
Top view of the heterogeneous compute modules 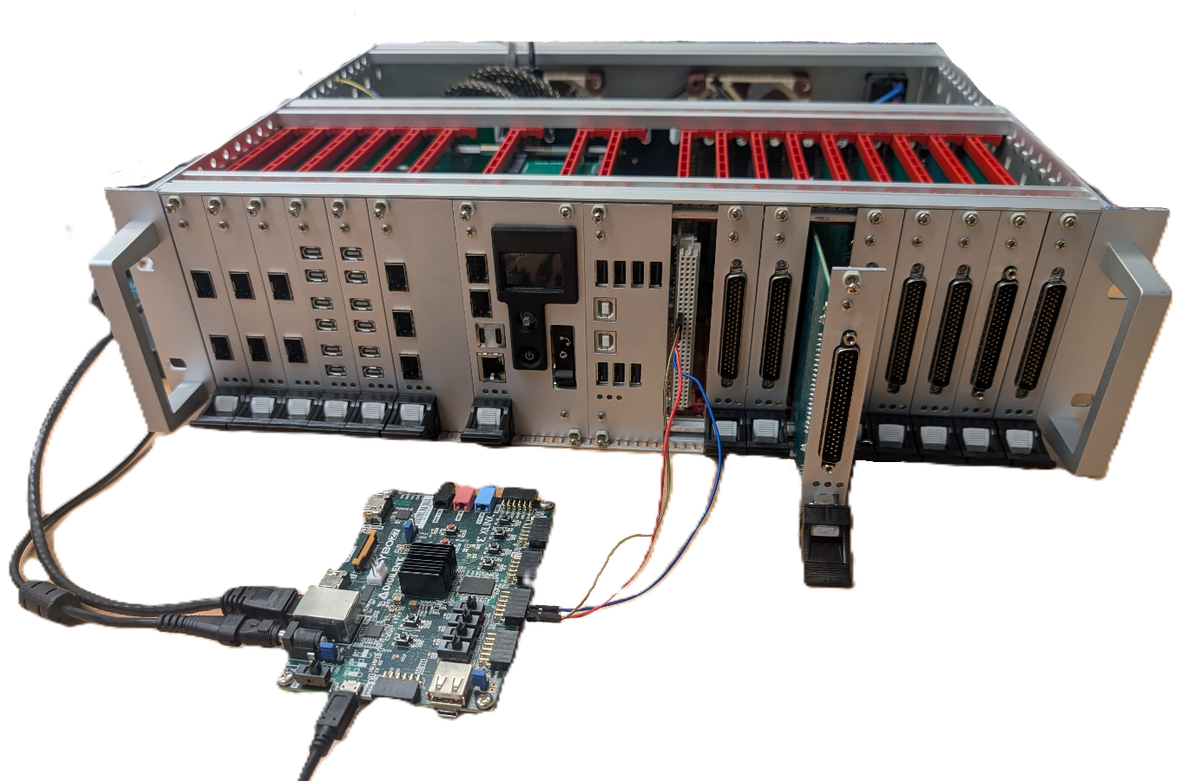
CAN Switch Matrix Developed and Successfully Tested
The OSxCAR CAN Switch Matrix has been successfully developed, manufactured, and tested under realistic operating conditions. It supports up to 8 CAN-FD buses at up to 5 Mbit/s and enables flexible, software-controlled interconnection.
The system is housed in an industrial DIN/Schroff chassis with 4-TE slots and provides additional digital and analog I/Os for versatile integration scenarios.
Multiple participants were flexibly routed to internal buses and communicated stably and without errors. The results confirm suitability for dynamically reconfigurable communication scenarios within the OSxCAR platform.
CAN Switch Matrix Developed and Successfully Tested 
OSxCAR Consortium Meeting: Collaboration in Action
For the last time in 2025, the OSxCAR project team met with partners from Bergische Universität Wuppertal, CETEQ GmbH, University of Bielefeld, and paraXent GmbH at Aptiv Services Deutschland GmbH’s CTC in Wuppertal.
Over two days, the consortium aligned technical strategies and reviewed major progress across all work packages.
Key highlights included:
- University of Bielefeld showcased advances in OSxCAR-specific cards for heterogeneous computing
- CETEQ presented enhanced testing frameworks tailored for WebAssembly modules
- paraXent demonstrated the integration of the low-latency switching platform within t.RECS
- Bergische Universität Wuppertal shared insights on network traffic prediction using machine learning for distributed automotive systems
- Aptiv showed real-time hardware implementations of WebAssembly components on embedded systems, progress on the parallel software framework Shadow Mode, and efforts in customer outreach and media dissemination
A major highlight was the hands-on workshop addressing integration challenges between component runtimes and platform services on real-time embedded systems. Technical discussions revealed new opportunities to optimize WebAssembly for automotive-specific requirements.
What makes OSxCAR unique is the blend of academic excellence and industry expertise. These collaborative sessions are essential as we shape the next generation of software-defined vehicle architectures.
OSxCAR Consortium Meeting: Collaboration in Action 
Group photo 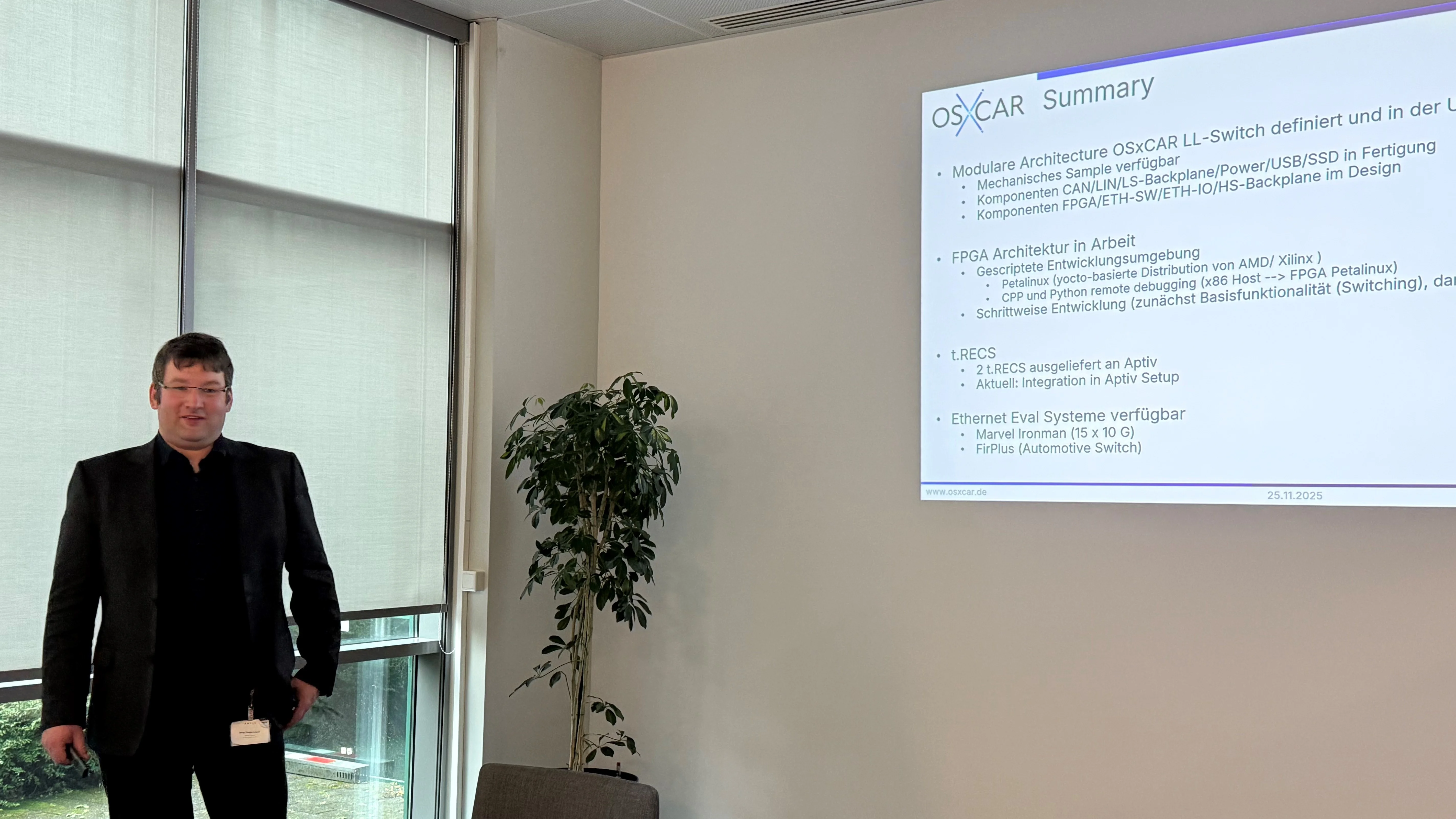
Summary of results 
Current status and outlook 
Successful installation of t.RECS 
Outlook and industry trends 
Mechanical Prototype of the Switch Matrix Assembled
The mechanical prototype of the modular OSxCAR Low-Latency Switch Matrix has been successfully realized. The platform supports flexible configurations from 10 GbE down to sub-gigabit networks, as well as reconfigurable CAN and LIN bus structures with up to 72 participants.
Core hardware components have been integrated, forming the foundation for a scalable, software-defined communication infrastructure within the OSxCAR testbed.
Mechanical Prototype of the Switch Matrix Assembled 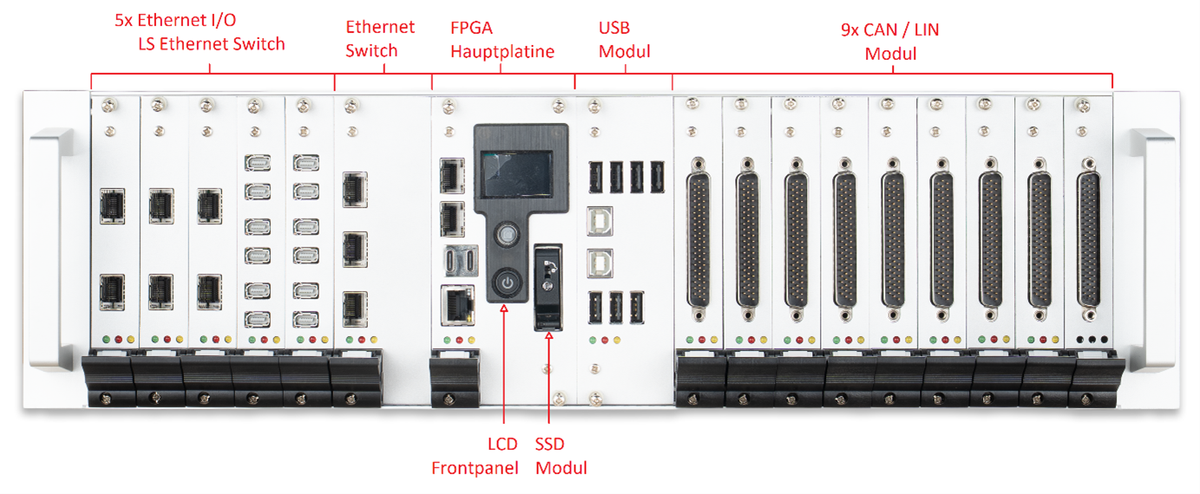
Front view 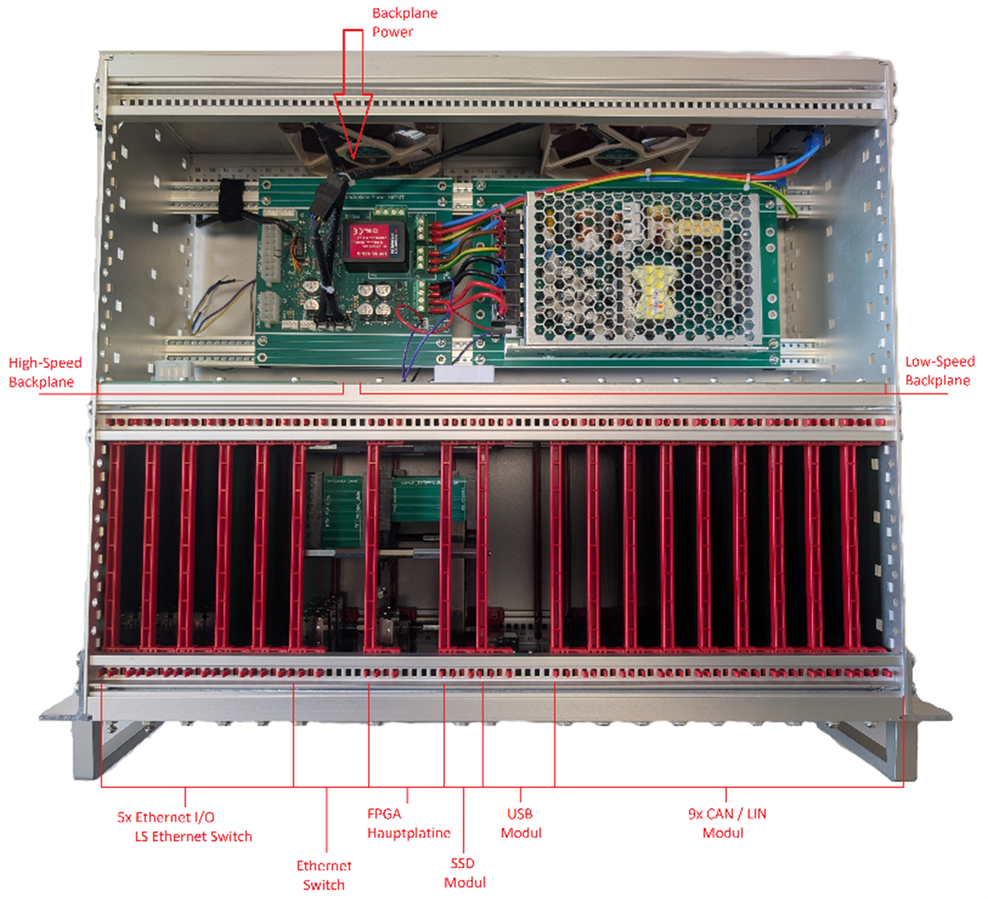
Top view 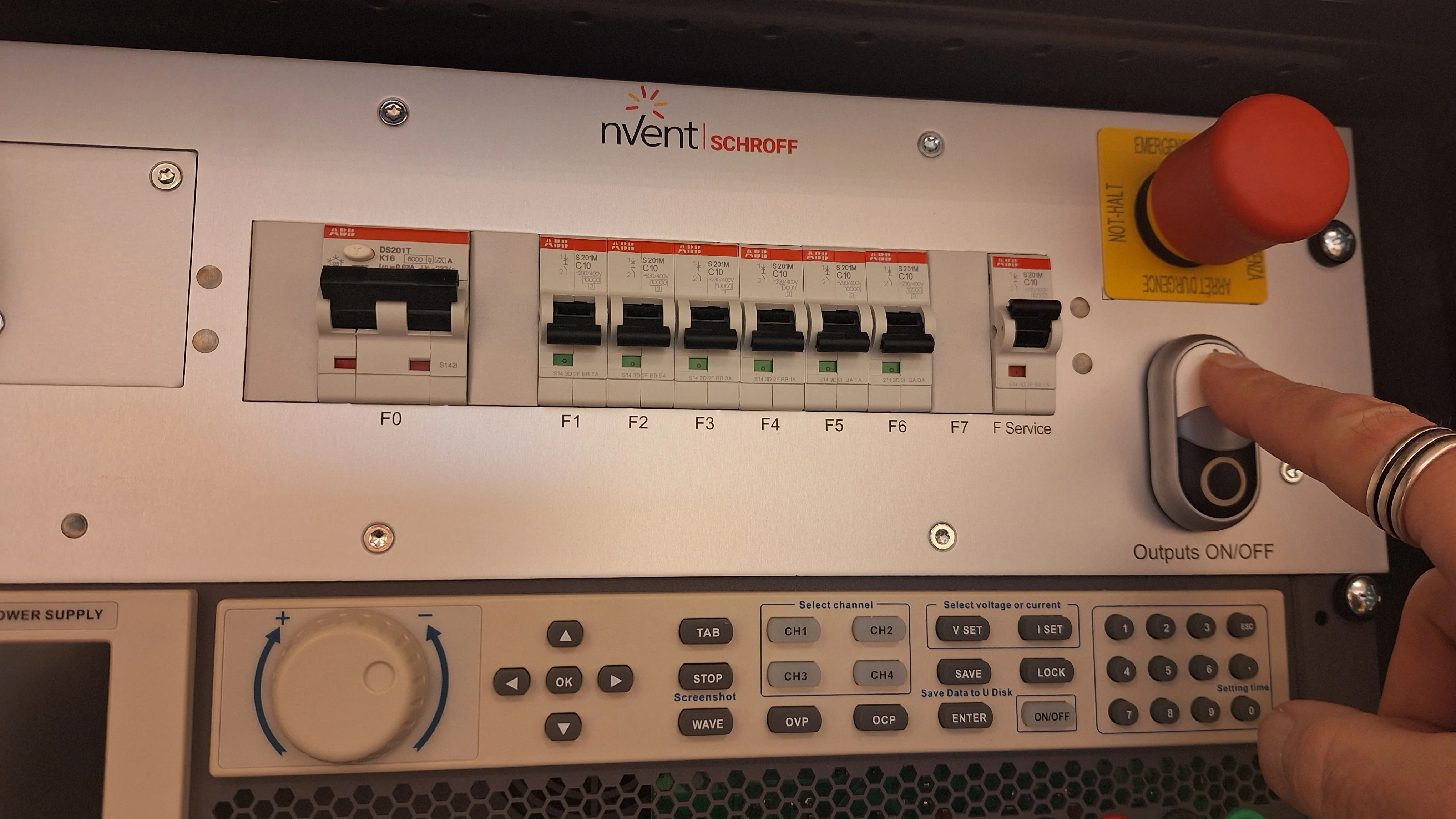
System Setup of the Testbench Racks
The first testbench racks have been successfully delivered and are now being assembled step by step. Currently, the system setup is underway, where the mechanical components, the available programmable power supplies, and the backplane structures are being properly configured and wired together. This milestone marks the beginning of the technical implementation and lays the foundation for the upcoming integration and validation phases.
System Setup of the Testbench Racks 
Rack control panel 
Rack trays ready for installation of additional modules 
OSxCAR Partner Meeting
The OSxCAR consortium met for Big Room Planning to define concrete work steps for the upcoming quarter. In two parallel working groups, the focus areas AI network optimization and testbench development were explored in depth.
Important decisions:
- Focus on concrete use cases with Radar/Fusion360 as benchmark
- Prioritization of comprehensive cloud-to-edge executability
- Use of GNN technology for network optimization
- Integration of a common test framework with graphical user interface
The hardware teams from paraXent and University of Bielefeld initiated the procurement of evaluation boards for Ethernet switches.
OSxCAR Partner Meeting Completion of Work Package 2

Quarterly Planning
In spring 2025, the project partners met for a focused quarterly planning session. The goal was fine-tuning of task distribution and scheduling.
Results:
- Optimization of work packages
- Coordination of interfaces between teams
- Definition of short-term goals
Quarterly Planning 2024 Progress Report finalized
Strategic Hardware Selection Finalized

OSxCAR Kickoff Meeting
On July 3, 2024, the official kickoff meeting of the OSxCAR project took place. All five project partners presented their teams and defined concrete work steps for the coming months.
Key results:
- Detailed task distribution across seven work packages
- Definition of first milestones and timeline
- Specification of technical concepts for WebAssembly integration and AI optimization
The partners Aptiv (consortium leader), CETEQ, paraXent, University of Bielefeld, and University of Wuppertal defined their respective expert teams and responsibilities.
OSxCAR Kickoff Meeting OSxCAR Project Launch
Continue: Publications • Media